


Robotický pes LocoMan sa dokáže postaviť na zadné ako surikata
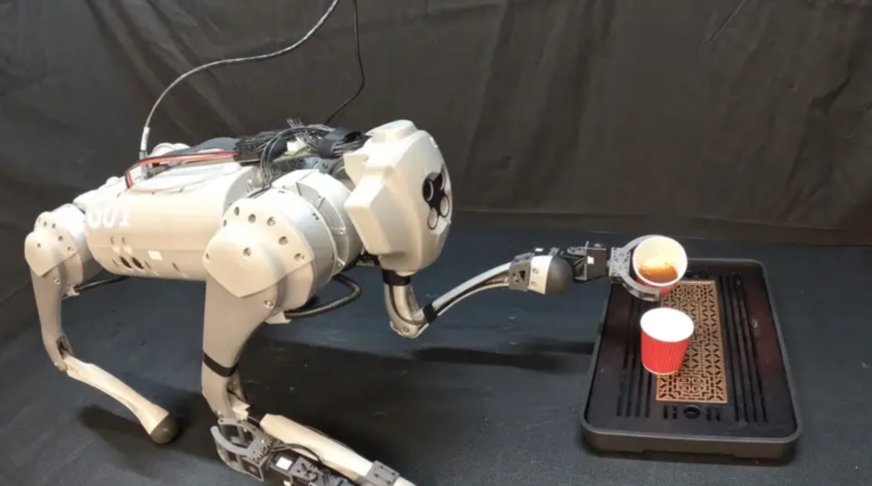
Vedci predviedli štvornohého robota, ktorý dokáže pomocou svojich dvoch predných nôh zdvíhať predmety a manipulovať s nimi počas chôdze po zadných. Štvornohé roboty majú zvyčajne podobu robotických psov, dokážu rýchlo prekonávať náročný terén a obyčajne majú nízke ťažisko. Väčšina štvornožcov manipulujúcich s predmetmi má dve prídavné ramená, ktorými môžu zdvíhať a niesť predmety, čo znamená, že majú spolu šesť „končatín“.
Robot LocoMan je však jedinečný, pretože sa dokáže z postoja na všetkých štyroch postaviť na zadné nohy a používať svoje dve predné nohy na manipuláciu s predmetmi. Fungovanie robota vedci načrtli v štúdii zverejnenej na predtlačovom serveri arXiv.
Nový prístup zvyšuje manipulačnú obratnosť štvornohých robotov prostredníctvom integrácie ľahkých lokomočných manipulátorov, čím rozširuje ich operačný pracovný priestor a umožňuje presné ovládanie zložitých 6D manipulačných úloh. Kľúčové pritom je, že schopnosť manipulovať s predmetmi bola vyvinutá bez toho, aby bola ohrozená pohyblivosť LocoMana.
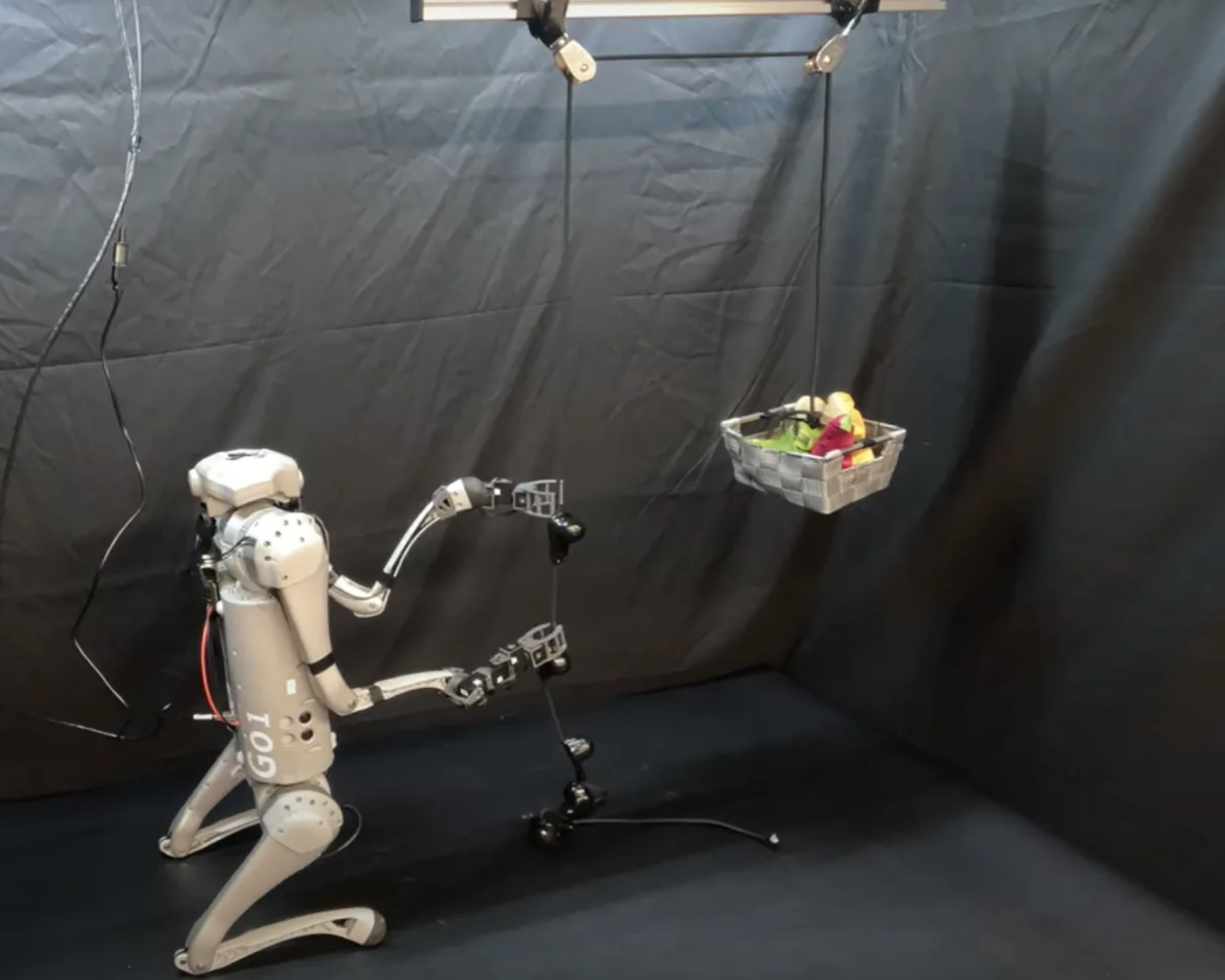
Jeho multifunkčné nohy však preukázali všestrannosť aj v náročných prostrediach, ako sú stiesnené priestory a skalnatý terén. Robot predviedol presné a stabilné pohyby počas úloh, ktoré si vyžadovali „zložitú koordináciu dvoch ramien“. Tým sa LocoMan odlišuje od iných štvornohých robotov.
Zdroj: livescience.com.
Zobrazit Galériu

